









With the growing demand for power for outdoor activities and emergency situations, efficient and reliable…

Charging your batteries with solar power is a valuable skill for outdoor enthusiasts, remote workers,…

Have you ever worried about your phone running low while camping? Or perhaps you're looking…
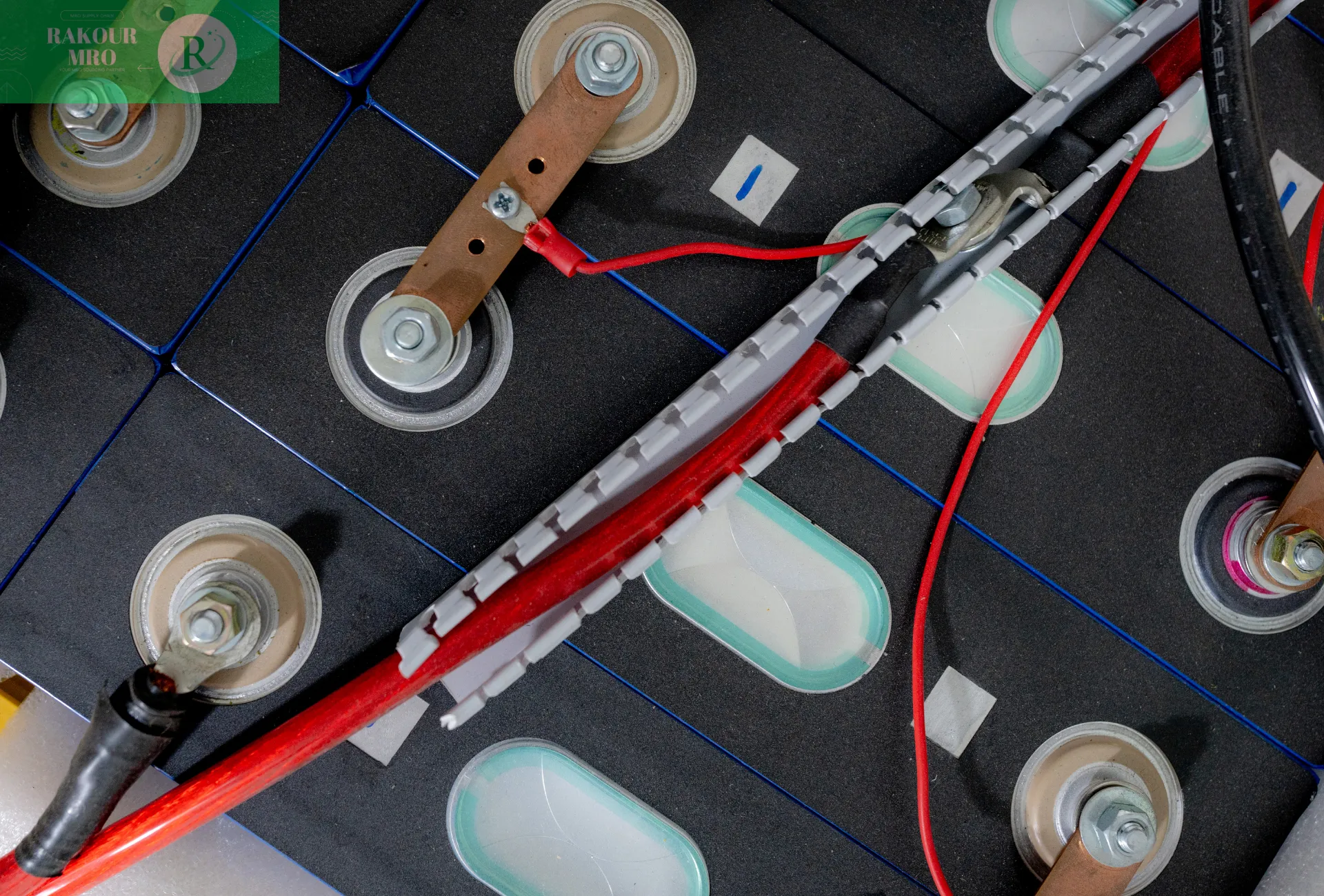
Battery safety and service life are crucial in electric vehicles and various electronic devices. Overcharging…

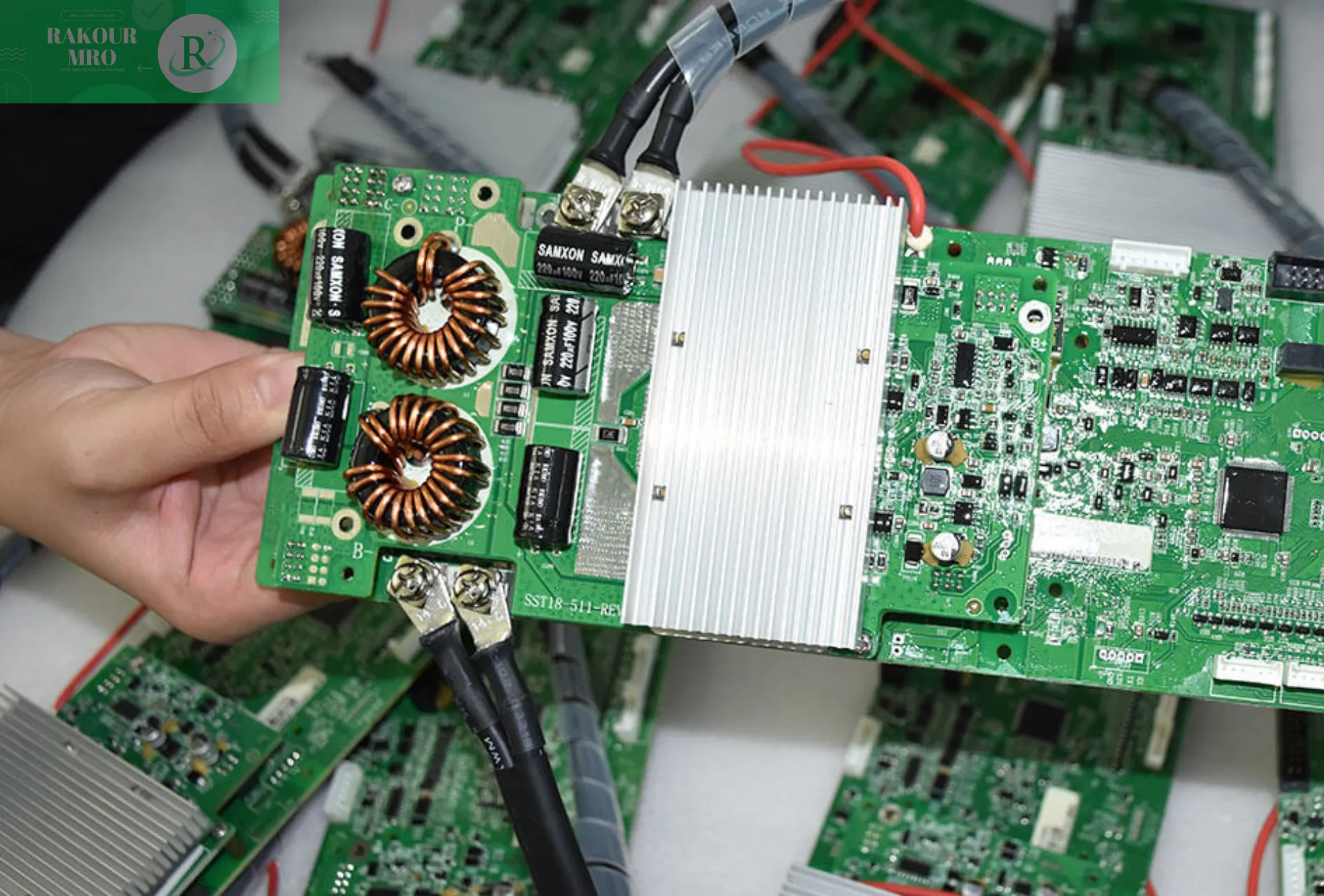
The Battery Management System (BMS) is an indispensable part of modern battery applications. It is…
The essence of the heat distribution problem of the pack is "how to make the…

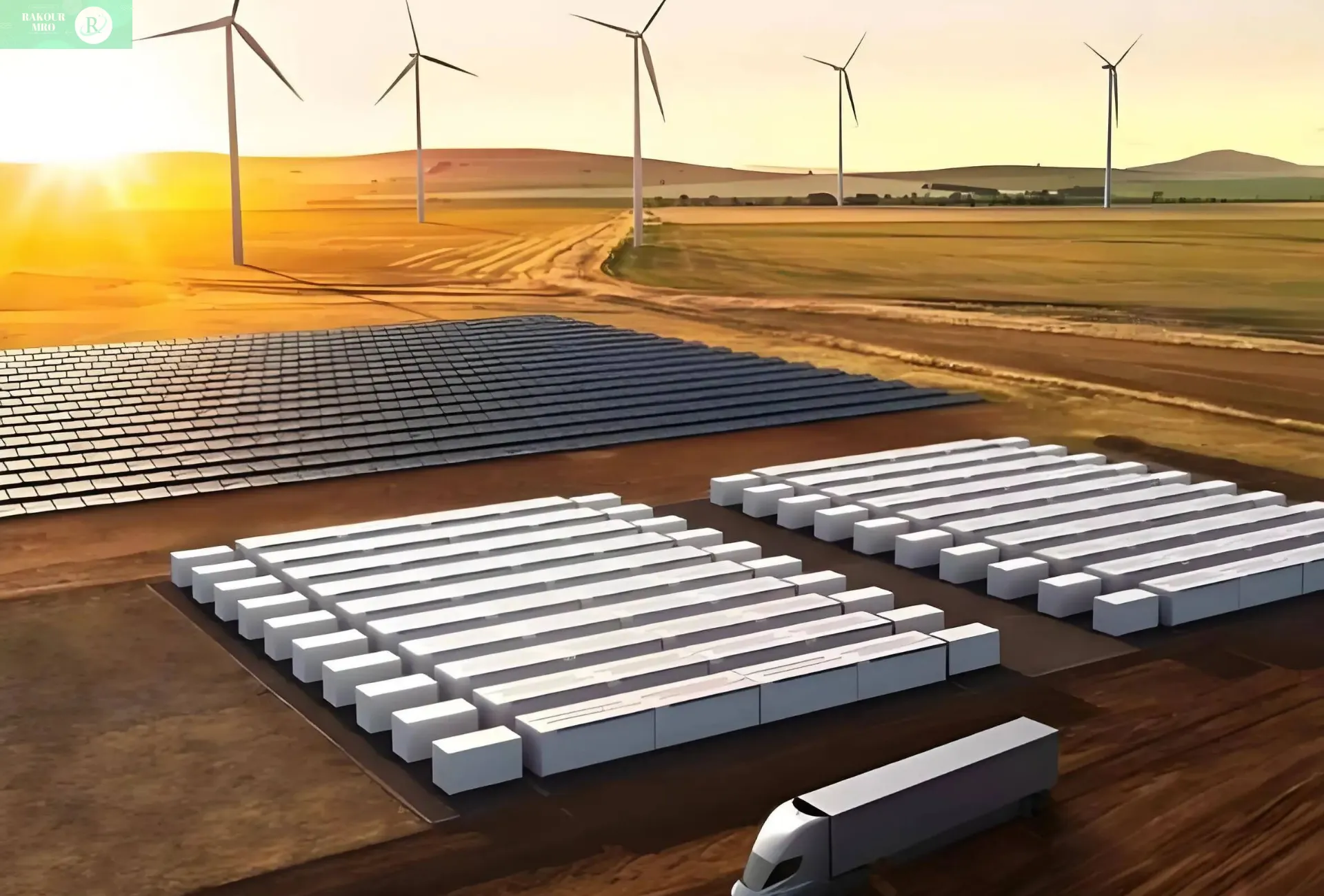
LG Electronics and Polish state-owned energy giant PGE recently announced a partnership, signing a 981MWh…

In the field of new energy, the safe and efficient operation of lithium battery packs…
Focusing on the "comfort zone" of industrial and commercial storage, modular PCS is accelerating its…

Italy is about to welcome a major project. Swiss energy and infrastructure company BKW has…